
Maszyny, które budujemy, są coraz doskonalsze i coraz mądrzejsze, ale zawsze budujemy je tak, żeby wykonywały jakąś pracę dla nas. Sens ich bytu polega na tym, że służą one ludziom, zaspokajają ich potrzeby, wypełniają ich polecenia. I to jest prawidłowe - w końcu po to tworzymy całą cywilizację, by nam służyła. Jednak od pradawnych czasów ludzie myśleli też o tym, czy mogą istnieć maszyny, które będą działały we własnym interesie. Dla których celem samym w sobie będzie własne istnienie i których działanie będzie podporządkowane dążeniu do tego celu. Opowiem Państwu dzisiaj o najdawniejszych próbach budowy takich maszyn.
REKLAMA
Po co to robię?
Bo jakiś czas temu udało mi się skutecznie zainteresować Państwa technicznymi modelami mózgu, tak zwanymi perceptronami. Opowiedziałem o tym, że maszyny te potrafiły się uczyć, dzięki czemu potrafiły (między innymi) przewidywać zachowania ludzi. Opisałem też podobieństwa, jakie zachodzą pomiędzy uczeniem się maszyny i uczeniem się człowieka, a także pokazałem, że perceptrony potrafią nawet fantazjować. Te wpisy zainspirowały wielu Czytelników, dostałem szereg ciekawych email z różnymi pomysłami, zwiększyła się liczba osób sięgających po moją książkę o perceptronach (nazywanych obecnie sieciami neuronowymi) oraz po udostępnione przeze mnie darmowe programy, pozwalające tworzyć i badać perceptrony na domowym komputerze. Można powiedzieć, że to "ziarno padło na urodzajną glebę" :-)
Bo jakiś czas temu udało mi się skutecznie zainteresować Państwa technicznymi modelami mózgu, tak zwanymi perceptronami. Opowiedziałem o tym, że maszyny te potrafiły się uczyć, dzięki czemu potrafiły (między innymi) przewidywać zachowania ludzi. Opisałem też podobieństwa, jakie zachodzą pomiędzy uczeniem się maszyny i uczeniem się człowieka, a także pokazałem, że perceptrony potrafią nawet fantazjować. Te wpisy zainspirowały wielu Czytelników, dostałem szereg ciekawych email z różnymi pomysłami, zwiększyła się liczba osób sięgających po moją książkę o perceptronach (nazywanych obecnie sieciami neuronowymi) oraz po udostępnione przeze mnie darmowe programy, pozwalające tworzyć i badać perceptrony na domowym komputerze. Można powiedzieć, że to "ziarno padło na urodzajną glebę" :-)
A przecież przestrzegano mnie, że perceptron to przeszłość. Ten pierwszy elektro-mechaniczny (!) jeszcze wtedy model mózgu zbudowano wszak w 1957 roku. Dla dzisiejszych użytkowników komputerów (ale także smartfonów, tabletów i innego podobnego sprzętu informatycznego) - to prehistoria. A jednak mimo archaicznej dziś technologii wykonania - w sensie koncepcyjnym perceptron jest tworem nadal fascynującym!
Liczę na to, że zdołam dzisiaj po raz kolejny zainteresować Państwa ciekawym zagadnieniem, którego korzenie tkwią jeszcze w latach 60. ubiegłego wieku, ale które może mieć swoją drugą młodość właśnie obecnie. Chodzi o tak zwane systemy samodzielne. Urządzenia, które istnieją i działają po to, żeby istnieć i działać. Tak jak my sami!
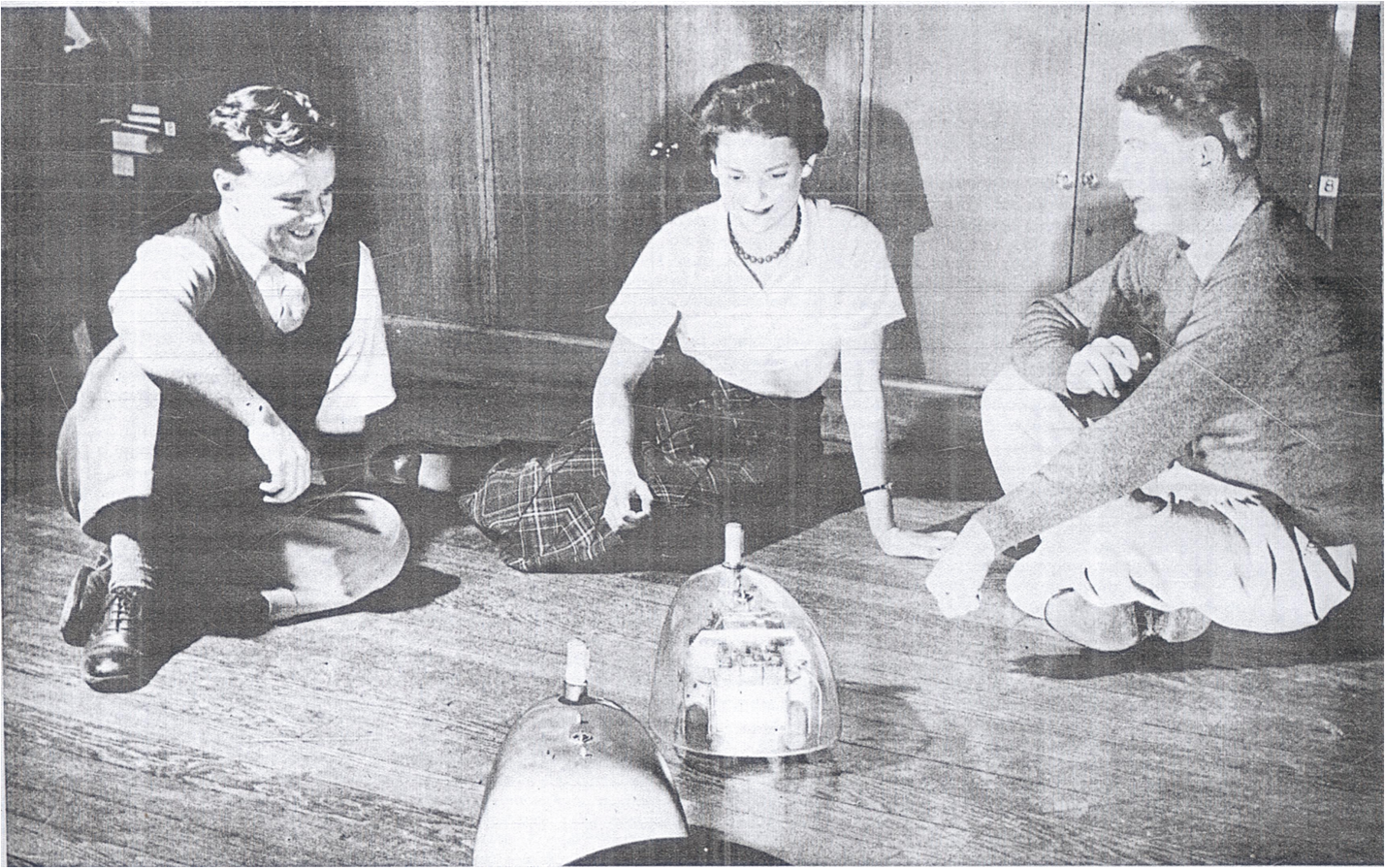
Pierwszymi tworami tego typu były sławne (swojego czasu) elektroniczne żółwie Waltera Graya.
'/%3e%3cpath%20class='cls-2'%20d='M212.89,56.37v51.7h-19V56.37H173.83v-16h59.11v16H212.89Z'%20transform='translate(0%200)'/%3e%3c/svg%3e)
Zbudowano dwie takie maszyny o nazwach Elmer i Elsie. Ich aktywność polegała na eksplorowaniu otoczenia. Gdy były "głodne", eksploracja miała konkretny cel: poszukiwały "karmnika", w którym ładowały swoje akumulatory energią elektryczną. Kiedy jednak były "syte" - zachowywały się jak ciekawskie zwierzątka. Wykazywały zainteresowanie źródłami światła, dążyły do nich, ale jednocześnie nie zbliżały się do nich nadmiernie, by ich oślepiały. Obserwowały siebie nawzajem, bo dla rejestracji ich ruchu konstruktor umieścił na ich "skorupach" niewielkie lampki, a poszukiwanie i obserwowanie źródeł światła było jedną z głównych cech "charakteru" tych maszyn.
A skoro o "charakterze" mowa, to warto dodać, że bardzo prostymi środkami Walter Gray zróżnicował czynniki determinujące zachowania obu żółwi. Elmer miał wzmacniacze elektroniczne nastawione na duży poziom amplifikacji sygnałów, co powodowało, że był bardzo "ofensywny" - dążył do celu energicznie i bardzo przebojowo. Popadał jednak w związku z tym w rozterki, gdy stykał się z bardziej złożoną sytuacją. Na przykład nie potrafił sobie poradzić z sytuacją, gdy miał do wyboru dwa źródła światła.
Elsie, która miała łagodniejszy temperament, nie szamotała się tak gorączkowo, ale na przykład potrafiła się przeglądać w lustrze i tańczyć "mirror dance" ze swoim odbiciem.
Co ciekawe - w wyścigu do karmnika energiczny Elmer zawsze przegrywał z subtelną i delikatną Elsie. Gdy docierał do karmnika zastawał tam zwykle wejście zablokowane przez "pupę" pożywiającej się Elsie...
Elektroniczne żółwie Waltera Graya były dość prymitywne, więc dzisiaj nikt by się nimi specjalnie nie interesował. Natomiast być może to właśnie one skłoniły polskiego naukowca, profesora Mariana Mazura, do napisania książki "Cybernetyczna teoria układów samodzielnych". Książkę tę wydało w 1966 roku Państwowe Wydawnictwo Naukowe i od tej pory książka ta fascynowała i zainspirowała bardzo wielu badaczy. Ja sam czytałem ją z zapartym tchem na studiach, a potem jako początkujący naukowiec próbowałem symulować na prymitywnych komputerach (dostępnych nam w latach 70.) różne układy samodzielne, co opisałem w kwartalniku "Postępy Cybernetyki" (tom 2, zeszyt 4 z 1979 roku). Początek tej mojej dawnej pracy przedstawiam na rysunku.
Potem odszedłem od badania układów samodzielnych i zająłem się biocybernetyką, ale fascynujące wizje profesora Mazura wciąż gdzieś tam miałem w tyle głowy. Dzisiaj chciałbym Państwu przybliżyć nieco te wizje, wierząc, że może ktoś podejmie ten temat i spróbuje teorię układów samodzielnych powiązać z praktyką współczesnej automatyki i robotyki.
Najpierw wyjaśnię, jak należy rozumieć układ samodzielny opisywany przez Mazura. Układ taki wygodnie jest wprowadzić wychodząc od prymitywniejszych układów: sterownego i samosterownego (zautomatyzowanego). Tu pewna uwaga: Zdecydowałem się podawać nazwy w takim brzmieniu, w jakim występują one w książce prof. Mazura, zależy mi bowiem na tym, żeby Czytelnicy zainteresowani tym wpisem po sięgnięciu do oryginału książki nie byli zdezorientowani odmienną terminologią - chociaż dzisiaj należałoby na przykład mówić o układzie sterowalnym, a nie sterownym. Podobnie jako ilustracje przywołuję niżej oryginalne rysunki z książki prof. Mazura, chociaż mógłbym to narysować ładniej. Ale znowu chodzi o to, żeby sięgając do książki Czytelnik tego wpisu od razu poczuł się w niej swojsko, odnajdując znane elementy. Z uwzględnieniem tej uwagi pokazuję, że układ sterowny wg. profesora Mazura przedstawia się tak:
Na rysunku tym występuje organizator (Org), czyli w praktyce człowiek sterujący pracą układu za pomocą sygnału s docierającego do receptora (Rec) - w wyniku czego jego efektor (Ef) realizuje jakąś reakcję R. Do realizacji reakcji potrzebna jest energia (moc), której dostarcza układ nazwany przez Mazura akumulatorem Ak. Akumulator pobiera energię z otoczenia w postaci strumienia mocy P i część z tej mocy (oznaczoną Pd) dodaje do reakcji R wykonywanej przez efektor, a część oddaje do otoczenia (oznacza to strumień mocy Po). Akumulator jest też sterowany przez organizatora. Na pozór wygląda to skomplikowanie, ale wynika to z faktu, że Mazur starał się w jednym schemacie zawrzeć opis dowolnego układu sterowalnego. Jeśli jednak weźmiemy pod uwagę konkretny układ sterowany (na przykład pojazd), to wszystko staje się jasne i logiczne. Organizator to kierowca, receptor to kierownica, efektor to samochód jako taki, reakcja to kierunek i szybkość jazdy, akumulator to silnik wraz ze zbiornikiem paliwa, moc P zapewnia dostarczane paliwo, Pd to moc napędzająca samochód a Po to moc tracona w chłodnicy. Sterowanie akumulatorem (tym teoretycznym, wprowadzonym przez Mazura, a nie tym konkretnym, obecnym także w każdym samochodzie, ale pełniącym rolę pomocniczą) przez organizatora (kierowcę) odbywa się za pomocą pedału gazu, sprzęgła i skrzyni biegów.
Współcześnie istnieje bardzo dużo różnych maszyn i urządzeń, które można opisać przy pomocy przedstawionego wyżej schematem i na tym polega jego przydatność. Pewnym anachronizmem byłoby używanie dziś nazw zaproponowanych pół wieku temu przez Mazura. Stąd nie mówimy o receptorach, tylko o sensorach (albo, przy układach zautomatyzowanych opisywanych dalej, o czujnikach i przetwornikach pomiarowych). Zamiast słowa efektor używa się określenia element wykonawczy, a dwuznaczny akumulator nazywa się dziś napędem. Ale schemat pozostaje aktualny.
Nie zawsze musimy sami kierować naszymi układami sterownymi, pojawiła się bowiem automatyka. Układ zautomatyzowany (samosterowny, jak go nazwał Marian Mazur), cechuje się tym, że sygnał s potrzebny do sterowania receptor pobiera sam (często jest to sygnał pochodzący z obserwacji skutków, jakie wywołuje efektor swoimi reakcjami R, czyli tak zwane sprzężenie zwrotne. Powiązaniem sygnałów z receptora z sygnałami wysyłanymi w trakcie sterowania do efektora zajmuje się element, któremu Mazur nadał nazwę korelator (Kor). Stawiający zadania organizator jest oddalony od układu, ale otrzymuje informacje od korelatora i od akumulatora i może oddziaływać na oba te podsystemy. W ten sposób mimo automatyzacji układ pozostaje nadal pod kontrolą organizatora.
Tak działają wszystkie systemy automatyki i tak funkcjonują roboty, chociaż nikt nie używa dziś określenia korelator, tylko mówi się o regulatorach i sterownikach.
Po opisaniu układów sterownych i samosterownych można zaprezentować wprowadzoną przez Mazura koncepcję układu samodzielnego. Jego schemat przedstawia rysunek poniżej.
Na rysunku tym pojawił się jeden dodatkowy element - tak zwany homeostat (Hom). Jego rola polega na takim oddziaływaniu na korelator i akumulator, żeby układ samodzielny jako całość odnosił korzyści.
W cytowanej książce Mariana Mazura "Cybernetyczna teoria układów samodzielnych" pokazano, że układ o pokazanej wyżej strukturze może przejawiać bardzo interesujące zachowania. Niesposób tu całej tej książki streszczać, ale Osobom zainteresowanym gorąco rekomenduję sięgnięcie do jej treści (korzystając z wyżej udostępnionego linku) i obejrzenie, jak ciekawie Mazur pokazał związki cech rejestratorów, estymatorów, korelatora i homeostatu z takimi cechami układów samodzielnych, które można kojarzyć z określonymi typami charakteru i osobowości u człowieka. Marian Mazur sam to zauważył i dokładnie dziesięć lat po książce o układach samodzielnych wydał książkę "Cybernetyka i charakter", gdzie w wielu sprawach zaledwie aluzyjnie wzmiankowanych w "układach samodzielnych" - postawił kropkę nad i. Jednak moim zdaniem ta druga książka jest gorsza, stąd gdy sam spróbowałem budować i badać układy samodzielne - opierałem się na wcześniejszym dziele Mazura. Na rysunku przedstawiam jeden ze schematów układów samodzielnych, które badałem.
Symulacja komputerowa potwierdziła wiele spostrzeżeń i wniosków wyciągniętych przez Mazura na podstawie analizy struktury i funkcji wymyślonego przez Niego układu samodzielnego, chociaż nie wszystkie wyniki można uznać za korzystne dla rozważanego modelu. Poniżej przytaczam końcowe wnioski z mojego artykułu, opublikowanego na ten temat w 1979 roku.
Jeśli temat Państwa zainteresuje, to w następnych wpisach pokażę kilka najciekawszych wniosków, jakie sformułował sam profesor Mazur na temat zdefiniowanych przez siebie cybernetycznych układów samodzielnych oraz co "smaczniejsze" wyniki moich badań symulacyjnych tych układów.
A na koniec jeszcze ciekawostka: twórca pierwszych elektronicznych żółwi, Gray Walter, uległ w 1970 roku wypadkowi drogowemu, w wyniku którego doznał nieodwracalnych uszkodzeń mózgu. Niczego już więcej nie zbudował ani nie zbadał, więc umarł w zapomnieniu w 1977 roku. O jego żółwiach także zapomniano. Tymczasem w 1995 roku Dr. Owen Holland odnalazł gdzieś w jakiejś rupieciarni zapomnianego Elmera. Wyremontował go i uruchomił.
I oto ożywiony po latach układ samodzielny zaczął ponownie eksplorować świat. Świat, który tak bardzo się zmienił od czasu jego "narodzin", na którym już od dawna nie było jego twórcy - a w którym on jednak potrafił odnaleźć swoje miejsce.
Nasuwa mi się takie skojarzenie: W noweli "Terminus" Stanisław Lem opisał robota, który jako jedyny przetrwał katastrofę , w której zginęła cała załoga statku kosmicznego. Przetrwał i zapamiętał dramatyczną agonię oraz postawy ludzi, których na Ziemi uznano za bohaterów, a którzy w obliczu nieuchronnej śmierci nie zawsze potrafili zachować się godnie. I przypomina mi się cytat z tej noweli:
"Kto może przeżyć śmierć? Tylko martwy".
Elmerowi się to udało. A co z innymi systemami samodzielnymi, tymi które już istnieją i tymi, które zbudujemy w przyszłości?
 Nie przegap żadnej ważnej wiadomości i obserwuj nas w Google News!
Nie przegap żadnej ważnej wiadomości i obserwuj nas w Google News!