
Paraliż jest dramatycznym kalectwem, zwłaszcza jeśli jest skutkiem wypadku, w którym pacjent doznał złamania kręgosłupa połączonego z uszkodzeniem rdzenia kręgowego. Paraliż bywa też czasem spowodowany innymi przyczynami (na przykład zatorem mózgu albo wylewem), ale tych przypadków tutaj nie omawiamy. Natomiast dla osób sparaliżowanych na skutek urazu kręgosłupa - pojawiła się iskierka nadziei.
REKLAMA
O możliwości wykorzystania sygnałów pochodzących wprost z mózgu osoby sparaliżowanej, dla umożliwienia jej samodzielnego poruszania się (w pewnym zakresie), pisałem już we wpisie na tym blogu. Opisałem tam eksperyment, jaki miał miejsce podczas rozpoczęcia brazylijskiego Mundialu 12.06.2014. W tym dniu dokonano rzeczy na pozór niemożliwej: Juliano Pinto, człowiek od lat sparaliżowany, wstał z wózka inwalidzkiego i jako pierwszy kopnął piłkę rozpoczynając tym samym mistrzostwa świata w piłce nożnej.
'/%3e%3cpath%20class='cls-2'%20d='M212.89,56.37v51.7h-19V56.37H173.83v-16h59.11v16H212.89Z'%20transform='translate(0%200)'/%3e%3c/svg%3e)
Dokonał tego za pomocą urządzenia technicznego nazywanego egzoszkieletem. Kibice piłki nożnej, zainteresowanie głównie mundialowymi meczami, nie zwrócili wystarczającej uwagi na to wydarzenie, podczas gdy ja w tym wpisie akcentowałem jego doniosłość, porównując je do pierwszego kroku człowieka na Księżycu.
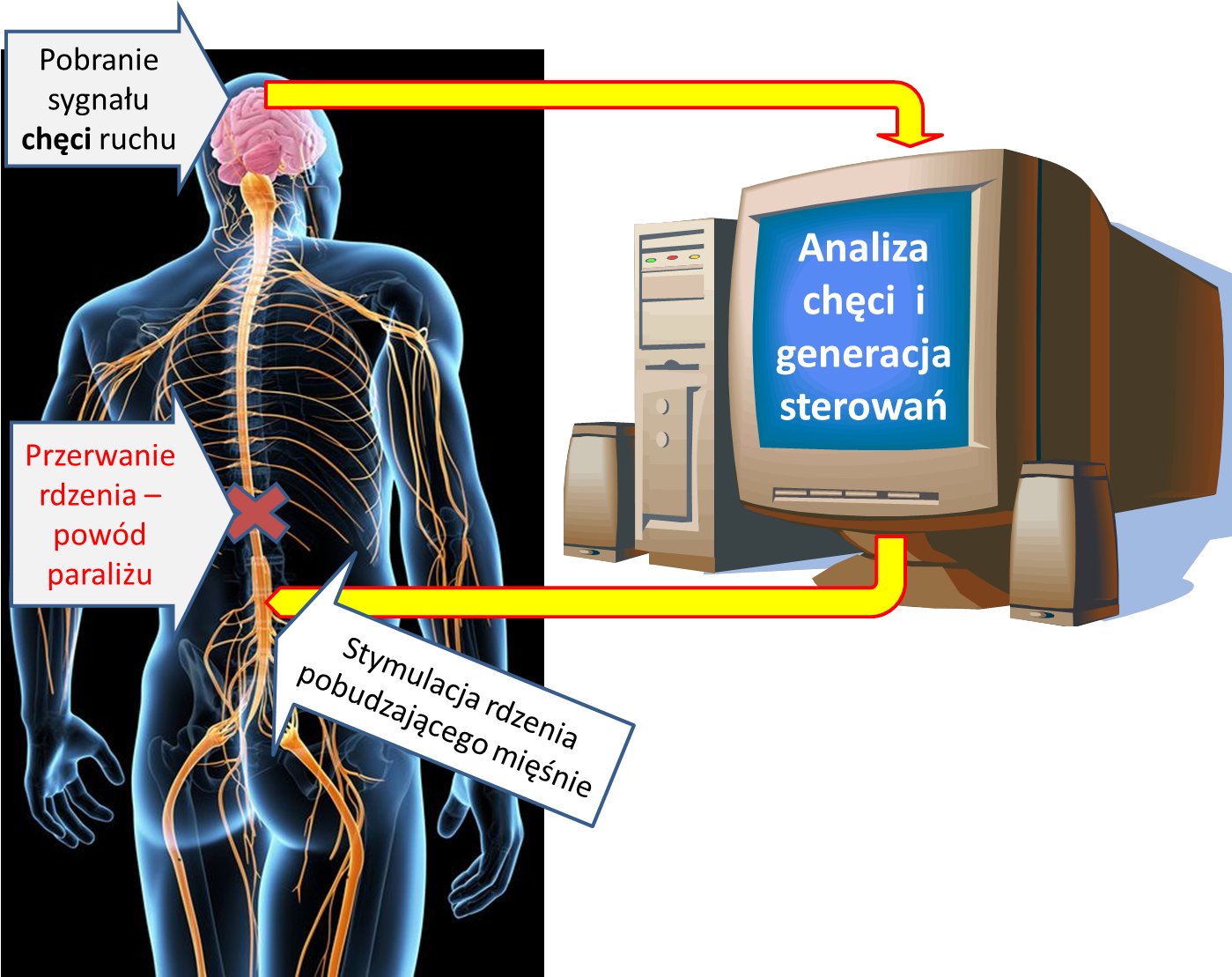
Metodę, przy pomocy której przywrócono zdolność ruchu bohaterowi wspomnianego wydarzenia ( Juliano Pinto) oraz wielu innym sparaliżowanym osobom, opisać można w sposób następujący:
Zaczyna się od tego, że specjalny hełm rejestruje aktywność mózgu osoby wspomaganej przez egzoszkielet. Nieco więcej można się o tym dowiedzieć z mojego wpisu opisującego, jak można sterować maszynami bezpośrednio za pomocą myśli. Odwołując się do tamtego wpisu chcę przypomnieć, że elektroniczny hełm odbiera w szczególności sygnały z tak zwanego zwoju przedcentralnego mózgu, określanego też jako Primary motor corex (M1).
Sygnały te wysyła mózg, gdy podejmujemy świadomą decyzję wykonania określonego ruchu, na przykład kroku do przodu. U zdrowego człowieka te sygnały z mózgu docierają do rdzenia kręgowego. Docierają nie bezpośrednio, tylko za pośrednictwem tak zwanej drogi piramidowej oraz (dodatkowo) bocznej drogi korowo-rdzeniowej, ale tych szczegółów anatomicznych nie będziemy tu analizować, bo dla prowadzonych w tym wpisie rozważań są one bez znaczenia. Żeby szczególnie zainteresowanych Czytelników nie pozbawiać możliwości zapoznania się z tymi szczegółami - przytaczam niżej ich schematyczny rysunek i krótki opis. Studiowanie tego rysunku i tego opisu nie jest jednak konieczne dla pełnego zrozumienia dalszej części tego wpisu, więc osoby nie zainteresowane szczegółami mogą to pominąć bez żadnej szkody :-)
Wzmiankuję też, że schemat tego całego systemu oraz opis zasady jego działania z punktu widzenie biocybernetyki przestudiować można w mojej książce:
Wracając do omówienia osiągnięcia, jakim było zapewnienie możliwości ruchu osobie sparaliżowanej przy pomocy opisanego egzoszkieletu - dalszy schemat postępowania był następujący:
Sygnały z mózgu, odpowiednio przetworzone, przeanalizowane i zinterpretowane przez system komputerowy, wykorzystano do generowania sygnałów sterujących robota (egzoszkieletu), który poruszał ciałem sparaliżowanego człowieka. Człowiek ten odzyskał dzięki temu zdolność wykonywania pewnych ruchów, chociaż tak naprawdę ruchy te wykonywał robot, troskliwie obudowany wokół jego sparaliżowanego ciała.
Przez długi czas wydawało się, że nic lepszego nie uda się stworzyć. Tymczasem w najnowszym numerze prestiżowego czasopisma naukowego "Nature" ukazał się artykuł pokazujący następny krok na drodze do przywrócenia władzy w nogach osobom sparaliżowanym. Istotę przeprowadzonego doświadczenia przedstawia oryginalny rysunek zaczerpnięty z cytowanej publikacji:
Jak widać, doświadczenia przeprowadzano na małpach, które miały sparaliżowaną jedną tylną nogę na skutek uszkodzenia rdzenia kręgowego (vide centralna część rysunku). Małpom tym wszczepiono do mózgu matrycę złożoną z 96 elektrod odbierających sygnały wprost z komórek nerwowych należących do opisywanej wyżej struktury zwoju przedcentralnego - czyli rejestrowano decyzje małpy dotyczące ruchu tylnych kończyn: wstawanie, siadanie, krok do przodu, krok do tyłu itp. Zwraca tu uwagę odmienność sytuacji, z jaką mieli do czynienia badacze przy budowie sterowanego myślą egzoszkieletu dla człowieka. W przypadku człowieka trzeba było rejestrować aktywność mózgu za pomocą specjalnego hełmu lub przy użyciu elektrod umieszczanych na skórze głowy - bez otwierania czaszki. To było trudne i bywało zawodne. Prowadzący badania na zwierzętach mogli wykorzystać elektrody wbite (dosłownie!) w korę mózgową małpy, dzięki czemu uzyskiwane sygnały były bardzo wyraźne i czytelne. Wewnątrz czaszki małpy umieszczano także urządzenie odbierające i wzmacniające te sygnały oraz wysyłające (bezprzewodowo) informacje na ich temat do komputera analizującego je (okrągły znacznik z cyfrą 1 na rysunku).
Komputer musiał symulować całą drogę piramidową i boczną drogę korowo-rdzeniową, wypracowując na podstawie aktywności kory mózgowej małpy - sygnały dla jej rdzenia kręgowego. Czynności te zasygnalizowano na rysunku numerem 2. Biocybernetyczny schemat operacji, jakie trzeba wykonać, żeby przejść od rodzącej się w mózgu decyzji do realnej aktywności mięśni, zaczerpnięty z mojej książki wzmiankowanej powyżej, wygląda jak następuje:
W przypadku doświadczeń z małpami, opisanych w cytowanej publikacji, program komputerowy długo uczył się (na podstawie sygnałów rejestrowanych u zdrowych zwierząt), jak należy kojarzyć aktywność kory mózgowej z sygnałami generowanymi na tej podstawie przez zdrowy rdzeń.
Wypracowane przez nauczony komputer sygnały sterujące były przesyłane (znowu bezprzewodowo!) do zaszytego w ciele małpy elektronicznego stymulatora, trochę podobnego do rozrusznika serca (numer 3 na rysunku).
Sterowany przez komputer stymulator wysyłał sygnału pobudzające rdzeń kręgowy małpy w tym obszarze, który został rozpoznany jako obszar normalnie sterujący mięśniami tylnej nogi. Pobudzenie było przekazywane przezoponowo (to znaczy, bez naruszania opon chroniących rdzeń i wypełnionych płynem mózgowo-rdzeniowym (nr 4 na rysunku)). Wygląd kluczowych elementów opisanego systemu przedstawia fotografia.
Po jej lewej stronie pokazany jest plastikowy model fragmentu kory mózgowej małpy z wbitą w zwój przedśrodkowy matrycą elektrod odbiorczych. Po prawej stronie pokazany jest stymulator, który wysyła sygnały do rdzenia kręgowego.
Stymulowany elektronicznie rdzeń sterował mięśniami nogi małpy, wysyłając do nich odpowiednie salwy impulsów. Mięśnie pod wpływem tych impulsów kurczyły się, a ich naprzemienne działanie (najpierw aktywizowały się mięśnie zginacze i małpa podnosiła nogę, a potem mięśnie prostowniki - i małpa stawiała nogę na ziemi, wykonując krok) powodowała, że małpa mogła normalnie chodzić. Ilustruje to rysunek, na którym u góry pokazano chód małpy bez włączonego elektronicznego sterowania nogą, a na dole jej chód po włączeniu elektronicznego sprzężenia mózgu i rdzenia.
Obserwując zachowanie nogi sterowanej elektronicznie i porównując je z zachowaniem nogi normalnie unerwionej (przypominam, że do doświadczenia wybierano te małpy, które miały sparaliżowaną tylko jedną nogę) - można było oceniać prawidłowość takiego elektronicznie sterowanego chodu. Po odpowiednim dostrojeniu aparatury jakość tego chodu można było ocenić zdecydowanie pozytywnie.
Oczywiście od doświadczeń na zwierzętach do sukcesów w leczeniu ludzi droga jest daleka. Ale być może doczekamy się tego, że będziemy mogli "uruchomić" sparaliżowanego człowieka stosując schemat przestawiony na początku tego wpisu, który "dla postawienia kropki nad i" poniżej jeszcze raz przywołuję.
W medycynie robi się ciekawie!
 Nie przegap żadnej ważnej wiadomości i obserwuj nas w Google News!
Nie przegap żadnej ważnej wiadomości i obserwuj nas w Google News!